Data Models & Ontology
The Mosaico Data Ontology is the semantic backbone of the SDK. It defines the structural "rules" that transform raw binary streams into meaningful physical data, such as GPS coordinates, inertial measurements, or camera frames.
By using a strongly-typed ontology, Mosaico ensures that your data remains consistent, validatable, and highly optimized for both high-throughput transport and complex queries.
Core Philosophy¶
The ontology is designed to solve the "generic data" problem in robotics by ensuring every data object is:
- Validatable: Uses Pydantic for strict runtime type checking of sensor fields.
- Serializable: Automatically maps Python objects to efficient PyArrow schemas for high-speed binary transport.
- Queryable: Injects a fluent API (
.Q) into every class, allowing you to filter databases based on physical values (e.g.,IMU.Q.acceleration.x > 6.0). - Middleware-Agnostic: Acts as an abstraction layer so that your analysis code doesn't care if the data originally came from ROS, a simulator, or a custom logger.
Available Ontology Classes¶
The Mosaico SDK provides a comprehensive library of models that transform raw binary streams into validated, queryable Python objects. These are grouped by their physical and logical application below.
Base Data Models¶
API Reference
These models serve as timestamped, metadata-aware wrappers for standard primitives. They allow simple diagnostic or scalar values to be treated as first-class members of the platform.
| Module | Classes | Purpose |
|---|---|---|
| Primitives | String, LargeString |
UTF-8 text data for logs or status messages. |
| Booleans | Boolean |
Logic flags (True/False). |
| Signed Integers | Integer8, Integer16, Integer32, Integer64 |
Signed whole numbers of varying bit-depth. |
| Unsigned Integers | Unsigned8, Unsigned16, Unsigned32, Unsigned64 |
Non-negative integers for counters or IDs. |
| Floating Point | Floating16, Floating32, Floating64 |
Real numbers for high-precision physical values. |
Geometry & Kinematics Models¶
API Reference
These structures define spatial relationships and the movement states of objects in 2D or 3D coordinate frames.
| Module | Classes | Purpose |
|---|---|---|
| Points & Vectors | Vector2d/3d/4d, Point2d/3d |
Fundamental spatial directions and locations. |
| Rotations | Quaternion |
Compact, singularity-free 3D orientation (). |
| Spatial State | Pose, Transform |
Absolute positions or relative coordinate frame shifts. |
| Motion | Velocity, Acceleration |
Linear and angular movement rates (Twists and Accels). |
| Aggregated State | MotionState |
An atomic snapshot combining Pose, Velocity, and Acceleration. |
Sensor Models¶
API Reference
High-level models representing physical hardware devices and their processed outputs.
| Module | Classes | Purpose |
|---|---|---|
| Inertial | IMU |
6-DOF inertial data: linear acceleration and angular velocity. |
| Navigation | GPS, GPSStatus, NMEASentence |
Geodetic fixes (WGS 84), signal quality, and raw NMEA strings. |
| Vision | Image, CompressedImage, CameraInfo, ROI |
Raw pixels, encoded streams (JPEG/H264), calibration, and regions of interest. |
| Environment | Temperature, Pressure, Range |
Thermal readings (K), pressure (Pa), and distance intervals (m). |
| Dynamics | ForceTorque |
3D force and torque vectors for load sensing. |
| Magnetic | Magnetometer |
Magnetic field vectors measured in microTesla (). |
| Robotics | RobotJoint |
States (position, velocity, effort) for index-aligned actuator arrays. |
Futures¶
API Reference
Prospective high-level models representing emerging or not yet fully standardized sensor hardware. The futures module acts as a transitional space where experimental ontologies are introduced and iteratively refined before being promoted to the stable, production-ready ontology set.
The following sensors are supported as first-class data types in this module:
| Model | Description |
|---|---|
| LiDAR | 3D point cloud data from laser-based ranging sensors, supporting full spatial geometry and optional intensity/RGB fields. |
| Radar | Range, velocity, and azimuth measurements from radio-frequency sensors, including Doppler-based target detection. |
| LaserScan | 2D planar sweep data from single-line laser rangefinders, encoded as ordered range and intensity arrays. |
| Multi-Echo LaserScan | Extension of LaserScan supporting multiple return echoes per beam, enabling richer surface characterization. |
| RGBD Camera | Paired color and depth frames from structured-light or time-of-flight RGB-D sensors. |
| Stereo Camera | Synchronized left/right image pairs from stereo rigs, suitable for disparity estimation and 3D reconstruction. |
| ToF Camera | Per-pixel depth and amplitude data from time-of-flight imaging sensors. |
Experimental Ontologies
The futures module is a transitional area where ontologies under active experimentation are hosted before graduating to the stable ontology set. Field definitions, unit conventions, and structural relationships are not yet considered final and will be refined based on feedback from real-world integrations and adopters. Once an ontology reaches sufficient maturity and coverage, it will be promoted out of futures and into the core, production-ready modules.
MosaicoType & MosaicoField¶
When defining ontologies in the Mosaico SDK, every class attribute carries two pieces of information:
- Python type used by Pydantic for validation and IDE support.
- PyArrow type used for efficient columnar serialization to Parquet/Arrow.
MosaicoType and MosaicoField let you express both in a single annotation, providing a clean single-source-of-truth API for ontology field declarations.
You annotate each attribute once, and the Arrow schema is derived automatically at class-definition time by introspecting Pydantic's model_fields: no separate schema declaration to maintain, no risk of the two representations drifting apart.
Because the whole mechanism is built on top of Pydantic model fields via Annotated metadata, extending or customising field behaviour is as simple as adding standard Pydantic Field kwargs: no subclassing, no metaclass magic, no separate schema registry to maintain.
MosaicoType¶
API Reference
MosaicoType is a collection of Annotated type aliases. Each alias bundles the corresponding Python primitive type with its PyArrow counterpart as inline metadata, making the Arrow type immediately visible to the schema auto-builder without any additional configuration.
Scalar types¶
| Alias | Python type | Arrow type |
|---|---|---|
MosaicoType.uint8 |
int |
pa.uint8() |
MosaicoType.int8 |
int |
pa.int8() |
MosaicoType.uint16 |
int |
pa.uint16() |
MosaicoType.int16 |
int |
pa.int16() |
MosaicoType.uint32 |
int |
pa.uint32() |
MosaicoType.int32 |
int |
pa.int32() |
MosaicoType.uint64 |
int |
pa.uint64() |
MosaicoType.int64 |
int |
pa.int64() |
MosaicoType.float16 |
float |
pa.float16() |
MosaicoType.float32 |
float |
pa.float32() |
MosaicoType.float64 |
float |
pa.float64() |
MosaicoType.bool |
bool |
pa.bool_() |
MosaicoType.string |
str |
pa.string() |
MosaicoType.large_string |
str |
pa.large_string() |
MosaicoType.binary |
bytes |
pa.binary() |
MosaicoType.large_binary |
bytes |
pa.large_binary() |
Explicit type definition¶
Using MosaicoType provides precise control over the underlying PyArrow schema:
from mosaicolabs import MosaicoField, MosaicoType, Serializable
class MyOntology(Serializable):
x: MosaicoType.float32
y: Optional[MosaicoType.float32] = None
x: defined directly, will be converted in a not nullable PyArrow field.y: wrapped inOptional[...], will be converted in a nullable PyArrow field.
Using Fallback types¶
You can also use standard Python type hints.
Mosaico automatically maps these to specific PyArrow types.
In this scenario, the types are resolved using the following fallback mapping:
| Python type | PyArrow equivalent |
|---|---|
int |
pa.int64() |
float |
pa.float64() |
str |
pa.string() |
bool |
pa.bool_() |
bytes |
pa.bytes() |
Note
Just like with explicit types, using Optional with fallback types will correctly define the PyArrow field as nullable. If Optional is not used, the field is defined as not nullable.
List types¶
For list fields, MosaicoType exposes a list_() static method that wraps a scalar type, either a MosaicoType alias or a raw Python primitive, into the appropriate pa.list_ Arrow type.
An optional list_size parameter produces a fixed-size list (pa.list_(type, size)), omitting it yields a variable-length list.
from mosaicolabs import MosaicoField, MosaicoField, Serializable
class MyOntology(Serializable):
# Variable-length list of float32
scores: Optional[MosaicoType.list_(MosaicoType.float32)] = None
# Fixed-size list of 3 float32 (e.g. an RGB vector)
color: MosaicoType.list_(MosaicoType.float32, list_size=3)
# Works with raw Python primitives too
tags: MosaicoType.list_(str)
# Works with other Pydantic models with pyarrow struct
vec: MosaicoType.list_(Vector3d)
# Fallback List
vec2: List[Vector2d]
list (or List from typing) generates a list of unfixed size in the underlying Arrow schema.
This means:
- The list can hold any number of elements at runtime.
- No size constraint is enforced at the schema level.
- This is equivalent to calling
MosaicoType.list_(str)with nosizeargument.
MosaicoType.list_() accepts an optional size parameter. When provided, it maps to an Arrow fixed-size list (pa.list_(type, list_size=N)), which enforces that every value in the column contains exactly N elements.
list[str] |
MosaicoType.list_(str) |
MosaicoType.list_(str, 3) |
|
|---|---|---|---|
| Arrow type | pa.list_(pa.string()) |
pa.list_(pa.string()) |
pa.list_(pa.string(), 3) |
| Size enforced | No | No | Yes, exactly 3 |
| Interoperable with Pydantic | Yes | Yes | Yes |
| Supports nested models | Yes | Yes | Yes |
Use MosaicoType.list_() with a size argument when:
- The list represents a fixed-dimensional structure, such as a vector, a coordinate tuple, or an RGB triplet.
- You want the Arrow schema to statically encode the size, enabling optimised columnar storage and stricter validation.
- You are working with embedding vectors or other ML features where dimensionality is always known and constant.
If you do not pass a size argument, MosaicoType.list_(T) and list[T] produce
an identical Arrow schema. The choice then becomes a matter of style or explicitness:
tags: list[str] # idiomatic Python - preferred for readability
tags: MosaicoType.list_(str) # explicit Mosaico style - equivalent result
Note
Explicit type definition and fallback types properties are hold in this case.
Matrix types¶
For 2-D matrix fields, MosaicoType exposes a matrix() static method that composes two nested list_() calls to represent a rectangular grid of shape (rows, cols).
Both dimensions are optional: omitting a dimension produces a variable-length axis, while supplying an integer value produces a fixed-size axis via Arrow's pa.list_(type, list_size=N).
from mosaicolabs import MosaicoField, Serializable
class MyOntology(Serializable):
# Fully variable matrix of float32
heatmap: Optional[MosaicoType.matrix(MosaicoType.float32)] = None
# Fixed 4×4 matrix
t: MosaicoType.matrix(MosaicoType.float32, rows=4, cols=4)
# Fixed-width rows, variable number of rows (e.g. token embeddings)
embeddings: MosaicoType.matrix(MosaicoType.float32, cols=768)
# Works with raw Python primitives too
grid: MosaicoType.matrix(int, rows=8, cols=8)
# Works also with other ontologies
onto: MosaicoType.matrix(Vector3d)
matrix(T) |
matrix(T, cols=N) |
matrix(T, rows=M, cols=N) |
|
|---|---|---|---|
| Arrow type | pa.list_(pa.list_(T)) |
pa.list_(pa.list_(T, N)) |
pa.list_(pa.list_(T, N), M) |
| Row count enforced | No | No | Yes, exactly M |
| Column count enforced | No | Yes, exactly N | Yes, exactly N |
| Interoperable with Pydantic | Yes | Yes | Yes |
| Support nested models | Yes | Yes | Yes |
Use MosaicoType.matrix() with explicit rows and/or cols when:
- The field represents a fixed-shape 2-D structure.
- You want the Arrow schema to statically encode both dimensions, enabling optimised columnar storage and stricter validation.
- You are working with fixed-width embedding matrices where the column dimension (feature size) is always constant but the number of rows may vary.
If neither dimension is provided, MosaicoType.matrix(T) produces a fully variable nested list, equivalent to list[list[T]].
Note
Explicit type definition and fallback type properties apply here as well.
Tensor3d types¶
For 3-D tensor fields, MosaicoType exposes a tensor3d() static method that composes a matrix() call with an outer list_() call to represent a volume of shape (depth, rows, cols).
All three dimensions are optional and follow the same convention as matrix(): omitting a dimension yields a variable-length axis; supplying an integer value produces a fixed-size axis.
from mosaicolabs import MosaicoField, Serializable
class MyOntology(Serializable):
# Fully variable 3-D tensor of float32
volume: Optional[MosaicoType.tensor3d(MosaicoType.float32)] = None
# Fixed-depth stack of variable matrices
f: MosaicoType.tensor3d(MosaicoType.float32, depth=16)
# Fully fixed tensor
j: MosaicoType.tensor3d(MosaicoType.float32, depth=3, rows=4, cols=5)
# Works with raw Python primitives too
cube: MosaicoType.tensor3d(int, depth=8, rows=8, cols=8)
# Works also with other Ontology model
onto: MosaicoType.tensor3d(Vector3d)
tensor3d(T) |
tensor3d(T, depth=D) |
tensor3d(T, depth=D, rows=M, cols=N) |
|
|---|---|---|---|
| Arrow type | pa.list_(pa.list_(pa.list_(T))) |
pa.list_(pa.list_(pa.list_(T)), D) |
pa.list_(pa.list_(pa.list_(T, N), M), D) |
| Depth enforced | No | Yes, exactly D | Yes, exactly D |
| Row count enforced | No | No | Yes, exactly M |
| Column count enforced | No | No | Yes, exactly N |
| Interoperable with Pydantic | Yes | Yes | Yes |
| Supoprt nested model | Yes | Yes | Yes |
Use MosaicoType.tensor3d() with explicit dimensions when:
- The field represents a fixed-shape volumetric structure.
- You want the Arrow schema to statically encode all three dimensions, enabling stricter schema validation and more efficient columnar storage.
- You are working with multi-channel ML features (e.g. convolutional layer outputs) where depth, height, and width are always known and constant.
If none of the dimensions are provided, MosaicoType.tensor3d(T) produces a fully variable nested list, equivalent to three nested list[list[list[T]]].
Note
Explicit type definition and fallback type properties apply here as well. When all dimensions are fixed, the Arrow schema enforces shape constraints at the column level, making tensor3d the recommended choice for any ML pipeline where tensor dimensionality is statically known.
Custom Arrow types¶
For specialised Arrow types not covered by the built-in aliases, you can always use MosaicoType.annotate() method.
This utility allows you to embed a raw PyArrow type directly into your ontology while maintaining full compatibility with the Mosaico schema builder.
MosaicoType.annotate() is a helper designed to bridge standard Python types with specific PyArrow configurations
(like timestamp precision or timezones). It requires two arguments:
- The Python Fallback Type: Used for runtime validation and Python-side type hinting (e.g., int, str).
- The PyArrow Type: The specific pyarrow type object to be used in the schema.
from mosaicolabs import Serializable, MosaicoField
class MyOntology(Serializable):
ts: MosaicoType.annotate(int, pa.timestamp("us", tz="UTC")) = MosaicoField(
description="UTC timestamp.")
Migration Note
Using MosaicoType.annotate(int, ...) is functionally equivalent to the standard Annotated[int, ...], but it provides a more explicit and optimized path for the Mosaico schema builder to resolve complex Arrow types.
MosaicoField¶
API Reference
MosaicoField is a factory function that returns a standard Pydantic Field instance, adding Mosaico-specific semantics on top of the native pydantic.Field. Because the return type is a native Pydantic Field, every standard Pydantic feature like validators, aliases, model_fields introspection, works out of the box.
Basic usage¶
from mosaicolabs import MosaicoType, MosaicoField, Serializable
class MyPointOntology(Serializable):
x: MosaicoType.float32 = MosaicoField(description="X coordinate")
y: MosaicoType.float32 = MosaicoField(description="Y coordinate")
label: Optional[MosaicoType.string] = MosaicoField(
default=None, description="Point label")
score: MosaicoType.float32 = MosaicoField(nullable=True)
With MosaicoField you can define the default value of your attribute, the nullable attribute of pyarrow field and also a description.
In particular you can omit nullable if your default = None, in this case nullable will be set to True automatically.
Nullability and Parquet V2¶
The nullable flag in MosaicoField controls whether the Arrow schema emits the field
as nullable. The default is False, fields are non-nullable unless explicitly stated
otherwise.
The distinction matters most when a reusable struct ontology is embedded inside a parent
ontology as an optional field. Consider a Quaternion: its individual components
(x, y, z, w) are logically required — a quaternion with missing components is
meaningless and cannot be constructed.
However, all four leaf fields must be declared as nullable due to how ParquetV2 handles
null optional columns during data reading. Consider a parent class such as IMU,
where orientation is declared as Optional[Quaternion]. If that column is null in
the Parquet file but the inner fields are not nullable in the schema, ParquetV2
cannot represent the absent struct correctly and instead reconstructs it as a
zero-initialised instance:
Declaring all leaf fields as nullable prevents this silent corruption: a fully-null
struct is preserved as None through the read/write round-trip, matching the original
intent of the Optional annotation.
class Quaternion(Serializable):
x: MosaicoType.float32 = MosaicoField(description="X component", nullable=True)
y: MosaicoType.float32 = MosaicoField(description="Y component", nullable=True)
z: MosaicoType.float32 = MosaicoField(description="Z component", nullable=True)
w: MosaicoType.float32 = MosaicoField(description="W component", nullable=True)
A parent ontology may choose to include the quaternion as an optional field — for example, a detection without orientation data is still valid. In that case the struct itself must also be nullable in the Arrow schema:
class DetectionOntology(Serializable):
position: MosaicoType.float32 = MosaicoField(description="Position")
# The quaternion struct as a whole is optional in this ontology,
# but its internal fields remain required when it is present.
orientation: Optional[QuaternionOntology] = MosaicoField(nullable=True, default=None)
Architecture¶
The ontology architecture relies on three primary abstractions: the Factory (Serializable), the Envelope (Message) and the Mixins
Serializable (The Factory)¶
API Reference
Every data payload in Mosaico inherits from the Serializable class. It manages the global registry of data types and ensures that the system knows exactly how to convert a string tag like "imu" back into a Python class with a specific binary schema.
Serializable uses the __pydantic_init_subclass__ hook, which is automatically called whenever a developer defines a new subclass.
Serializable performs the following steps automatically:
- Generate the schema: Introspect
model_fieldsto extract the PyArrow type embedded in each field'sAnnotatedmetadata viaMosaicoTypealiases or rawAnnotated[T, pa.SomeType()]annotations and build the__msco_pyarrow_struct__automatically. - Generates Tag: If the class doesn't define
__ontology_tag__, it auto-generates one from the class name (e.g.,MyCustomSensor->"my_custom_sensor"). - Registers Class: It adds the new class to the global types registry.
- Injects Query Proxy: It dynamically adds a
.Qattribute to the class, enabling the fluent query syntax (e.g.,MyCustomSensor.Q.voltage > 12.0).
Message (The Envelope)¶
API Reference
The Message class is the universal transport envelope for all data within the Mosaico platform. It acts as the "Source of Truth" for synchronization and spatial context, combining specific sensor data (the payload) with critical middleware-level metadata. By centralizing metadata at the envelope level, Mosaico ensures that every data point—regardless of its complexity—carries a consistent temporal and spatial identity.
from mosaicolabs import Message, Time, Temperature
# Create a Temperature message with unified envelope metadata
meas_time = Time.now()
temp_msg = Message(
timestamp_ns=meas_time.to_nanoseconds(), # Primary synchronization clock
frame_id="comp_case", # Spatial reference frame
seq_id=101, # Optional sequence ID for ordering
data=Temperature.from_celsius(
value=57,
variance=0.03
)
)
While logically a Message contains a data object, the physical representation on the wire (PyArrow/Parquet) is flattened,
ensuring zero-overhead access to nested data during queries while maintaining a clean, object-oriented API in Python.
- Logical:
Message(timestamp_ns=123, frame_id="map", data=IMU(acceleration=Vector3d(x=1.0,...))) - Physical:
Struct(timestamp_ns=123, frame_id="map", seq_id=null, acceleration, ...)
The Message mechanism enables a flexible dual-usage pattern for every Mosaico ontology type, supporting both Standalone Messages and Embedded Fields.
Standalone Messages¶
Any Serializable type (from elementary types like String and Float32 to complex sensors like IMU) can be used as a standalone message. When assigned to the data field of a Message envelope, the type represents an independent data stream with its own global timestamp and metadata, that can be pushed via a dedicated TopicWriter.
This is ideal for pushing processed signals, debug values, or simple sensor readings.
# Sending a raw Vector3d as a timestamped standalone message with its own uncertainty
accel_msg = Message(
timestamp_ns=ts,
frame_id="base_link",
data=Vector3d(
x=0.0,
y=0.0,
z=9.81,
covariance=[0.01, 0, 0, 0, 0.01, 0, 0, 0, 0.01] # 3x3 Diagonal matrix
)
)
accel_writer.push(message=accel_msg)
# Sending a raw String as a timestamped standalone message
log_msg = Message(
timestamp_ns=ts,
frame_id="base_link",
data=String(data="Waypoint-miss in navigation detected!")
)
log_writer.push(message=log_msg)
Embedded Fields¶
Serializable types can also be embedded as internal fields within a larger structure. In this context, they behave as standard data types. While the parent Message provides the global temporal context, the embedded fields can carry their own granular attributes, such as unique uncertainty matrices.
# Embedding Vector3d inside a complex IMU model
imu_payload = IMU(
# Embedded Field 1: Acceleration with its own specific uncertainty
# Here the Vector3d instance inherits the timestamp and frame_id
# from the parent IMU Message.
acceleration=Vector3d(
x=0.5, y=-0.2, z=9.8,
covariance=[0.1, 0, 0, 0, 0.1, 0, 0, 0, 0.1]
),
# Embedded Field 2: Angular Velocity
angular_velocity=Vector3d(x=0.0, y=0.0, z=0.0)
)
# Wrap the complex payload in the Message envelope
imu_writer.push(Message(timestamp_ns=ts, frame_id="imu_link", data=imu_payload))
Mixins: Uncertainty & Robustness¶
Mosaico uses Mixins to inject standard uncertainty fields across different data types, ensuring a consistent interface for sensor fusion and error analysis. These fields are typically used to represent the precision of the sensor data.
CovarianceMixin¶
API Reference
Injects multidimensional uncertainty fields, typically used for flattened covariance matrices (e.g., 3x3 or 6x6) in sensor fusion applications.
class MySensor(Serializable, CovarianceMixin):
# Automatically receives covariance and covariance_type fields
...
VarianceMixin¶
API Reference
Injects monodimensional uncertainty fields, useful for sensors with 1-dimensional uncertain data like Temperature or Pressure.
class MySensor(Serializable, VarianceMixin):
# Automatically receives variance and variance_type fields
...
By leveraging these mixins, the platform can perform deep analysis on data quality—such as filtering for only "high-confidence" segments—without requiring unique logic for every sensor type.
Extending with Mixins¶
One of the most powerful consequences of building on top of Pydantic model fields is how natural mixin composition becomes. Because every field, including its Arrow type metadata, lives in model_fields, you can split concerns into focused mixin classes and combine them freely without any additional registration or schema merging step.
from mosaicolabs import BaseModel, MosaicoType, MosaicoField, Serializable
class GeometryMixin(BaseModel):
x: MosaicoType.float32 = MosaicoField(description="X coordinate")
y: MosaicoType.float32 = MosaicoField(description="Y coordinate")
z: MosaicoType.float32 = MosaicoField(description="Z coordinate")
class ConfidenceMixin(BaseModel):
confidence: MosaicoType.float32 = MosaicoField(description="Detection score [0, 1]")
class MetadataMixin(BaseModel):
label: Optional[MosaicoType.string] = MosaicoField(default=None, nullable=True)
sensor_id: MosaicoType.string = MosaicoField(description="Source sensor identifier")
ts: Annotated[int, pa.timestamp("us", tz="UTC")]
# Combine mixins, the Arrow schema aggregates all fields automatically
class DetectionOntology(Serializable, GeometryMixin, ConfidenceMixin, MetadataMixin):
pass
When DetectionOntology is defined, __pydantic_init_subclass__ calls _build_ontology_struct, which walks the full model_fields MRO chain, extracts the PyArrow metadata from each Annotated annotation, and produces a single consolidated pa.struct, no extra code required.
This makes ontology composition additive by default: add a mixin to inherit its fields, remove it to drop them. The schema stays consistent with zero boilerplate.
Querying Data Ontology with the Query (.Q) Proxy¶
The Mosaico SDK allows you to perform deep discovery directly on the physical content of your sensor streams. Every class inheriting from Serializable, including standard sensors, geometric primitives, and custom user models, is automatically injected with a static .Q proxy attribute.
This proxy acts as a type-safe bridge between your Python data models and the platform's search engine, enabling you to construct complex filters using standard Python dot notation.
How the Proxy Works¶
The .Q proxy recursively inspects the model’s schema to expose every queryable field path. It identifies the data type of each field and provides only the operators valid for that type (e.g., numeric comparisons for acceleration, substring matches for frame IDs).
- Direct Field Access: Filter based on primary values, such as
Temperature.Q.value.gt(25.0). - Nested Navigation: Traverse complex, embedded structures. For example, in the
GPSmodel, you can drill down into the status sub-field:GPS.Q.status.satellites.geq(8). - Mixin Integration: Fields inherited from mixins are automatically included in the proxy. This allows you to query uncertainty metrics (from
VarianceMixinorCovarianceMixin) across any model.
Queryability Examples¶
The following table illustrates how the proxy flattens complex hierarchies into queryable paths:
| Type Field Path | Proxy Field Path | Source Type | Queryable Type | Supported Operators |
|---|---|---|---|---|
IMU.acceleration.x |
IMU.Q.acceleration.x |
float |
Numeric | .eq(), .lt(), .gt(), .leq(), .geq(), .in_(), .between() |
GPS.status.hdop |
GPS.Q.status.hdop |
float |
Numeric | .eq(), .lt(), .gt(), .leq(), .geq(), .in_(), .between() |
IMU.frame_id |
IMU.Q.frame_id |
str |
String | .eq(), .match(), .in_(), .lt(), .gt(), .leq(), .geq() |
GPS.covariance_type |
GPS.Q.covariance_type |
int |
Numeric | .eq(), .lt(), .gt(), .leq(), .geq(), .in_(), .between() |
Practical Usage¶
To execute these filters, pass the expressions generated by the proxy to the QueryOntologyCatalog builder.
from mosaicolabs import MosaicoClient, IMU, GPS, QueryOntologyCatalog
with MosaicoClient.connect("localhost", 6726) as client:
# orchestrate a query filtering by physical thresholds AND metadata
qresponse = client.query(
QueryOntologyCatalog(include_timestamp_range=True) # Ask for the start/end timestamps of occurrences
.with_expression(IMU.Q.acceleration.z.gt(15.0))
.with_expression(GPS.Q.status.service.eq(2))
)
# The server returns a QueryResponse grouped by Sequence for structured data management
if qresponse is not None:
for item in qresponse:
# 'item.sequence' contains the name for the matched sequence
print(f"Sequence: {item.sequence.name}")
# 'item.topics' contains only the topics and time-segments
# that satisfied the QueryOntologyCatalog criteria
for topic in item.topics:
# Access high-precision timestamps for the data segments found
start, end = topic.timestamp_range.start, topic.timestamp_range.end
print(f" Topic: {topic.name} | Match Window: {start} to {end}")
For a comprehensive list of all supported operators and advanced filtering strategies (such as query chaining), see the Full Query Documentation and the Ontology types SDK Reference in the API Reference:
API Reference
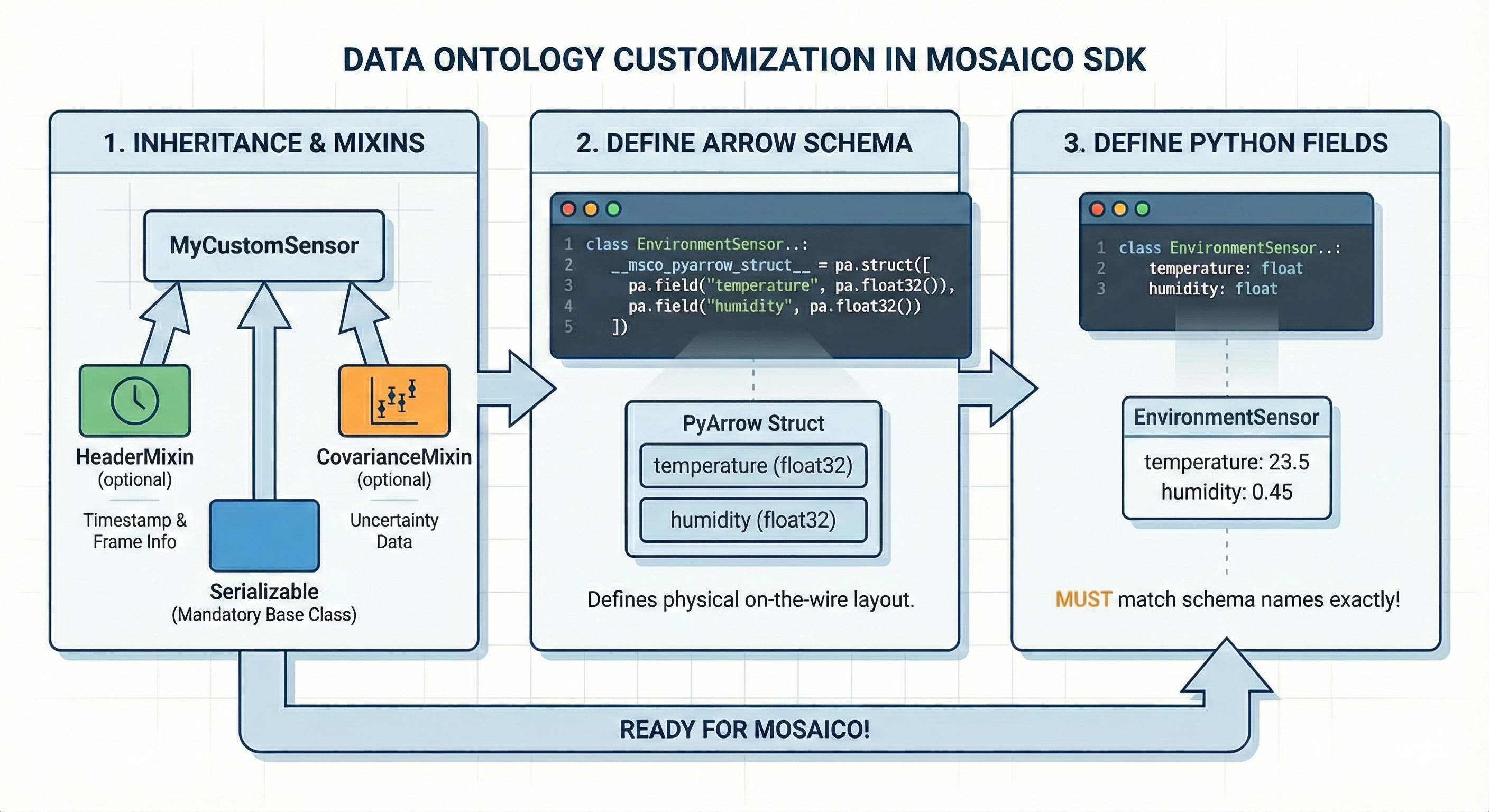
Customizing the Ontology¶
The Mosaico SDK is built for extensibility, allowing you to define domain-specific data structures that can be registered to the platform and live alongside standard types. Custom types are automatically validatable, serializable, and queryable once registered in the platform.
Follow these three steps to implement a compatible custom data type:
1. Inheritance and Mixins¶
Your custom class must inherit from Serializable to enable auto-registration, factory creation, and the queryability of the model.
To align with the Mosaico ecosystem, use the following mixins:
CovarianceMixin: Used for data including measurement uncertainty, standardizing the storage of covariance matrices.
2. Define the Wire Schema¶
Annotate each field with a MosaicoType alias and wrap it with MosaicoField. Fields and schema are declared together in a single annotation — the __msco_pyarrow_struct__ is derived automatically from model_fields at class-definition time, so there is no separate schema declaration to maintain.
2.1 Serialization Format Optimization¶
API Reference
You can optimize remote server performance by overriding the __serialization_format__ attribute. This controls how the server compresses and organizes your data.
| Format | Identifier | Use Case Recommendation |
|---|---|---|
| Default | "default" |
Standard Table: Fixed-width data with a constant number of fields. |
| Ragged | "ragged" |
Variable Length: Best for lists, sequences, or point clouds. |
| Image | "image" |
Blobs: Raw or compressed images requiring specialized codec handling. |
If not explicitly set, the system defaults to Default format.
Customization Example: EnvironmentSensor¶
This example demonstrates a custom sensor for environmental monitoring that tracks temperature, humidity, and pressure.
# file: custom_ontology.py
from typing import Optional
import pyarrow as pa
from mosaicolabs.models import MosaicoField, MosaicoType, Serializable
class EnvironmentSensor(Serializable):
"""
Custom sensor reading for Temperature, Humidity, and Pressure.
"""
# --- 1. Define the Wire Schema ---
temperature: MosaicoType.float32
humidity: Optional[MosaicoType.float32] = MosaicoField(
default= None, nullable=True)
pressure: Optional[MosaicoType.float32] = MosaicoField(
default= None, nullable=True)
# --- Usage Example ---
from mosaicolabs.models import Message, Header, Time
# Initialize with standard metadata
meas = EnvironmentSensor(
header=Header(stamp=Time.now(), frame_id="lab_sensor_1"),
temperature=23.5,
humidity=0.45
)
# Ready for streaming or querying
# writer.push(Message(timestamp_ns=ts, data=meas))